|
|
# 2024 Origami-Informed Robots |
|
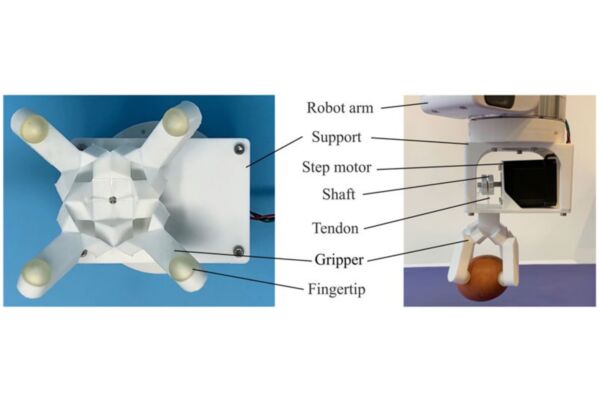
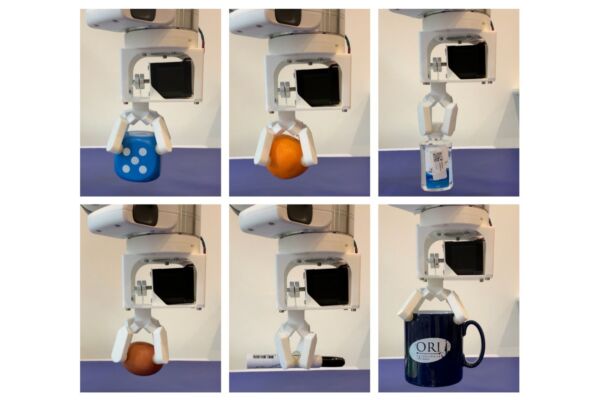
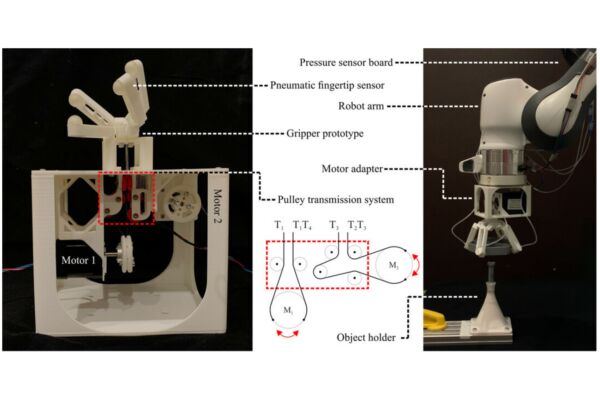
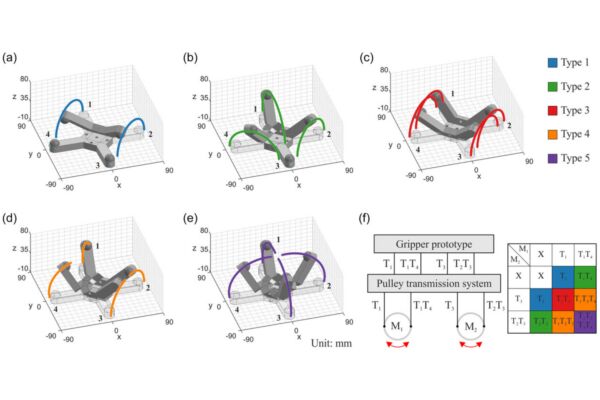
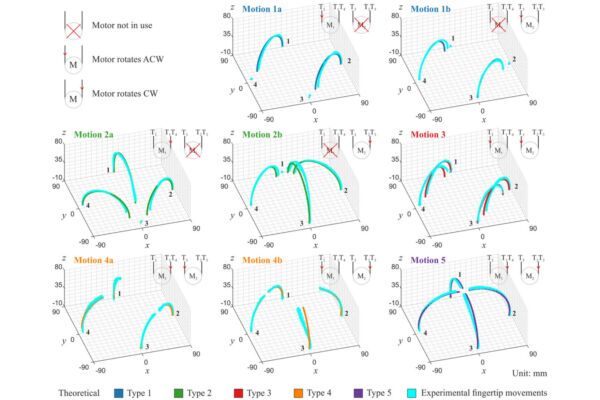
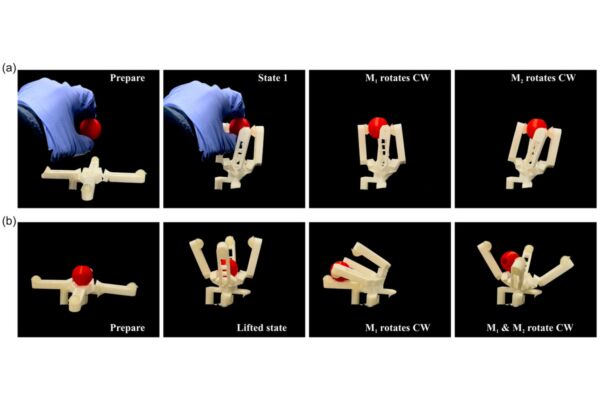
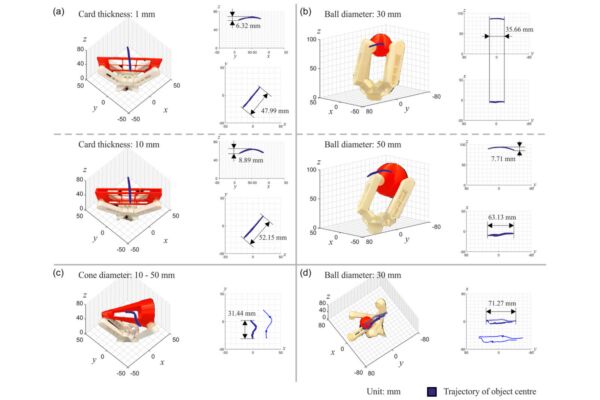
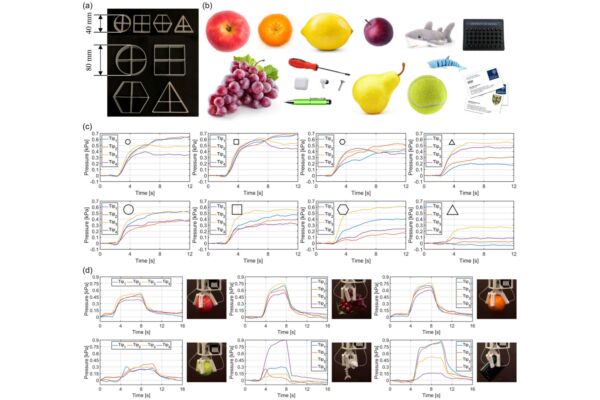
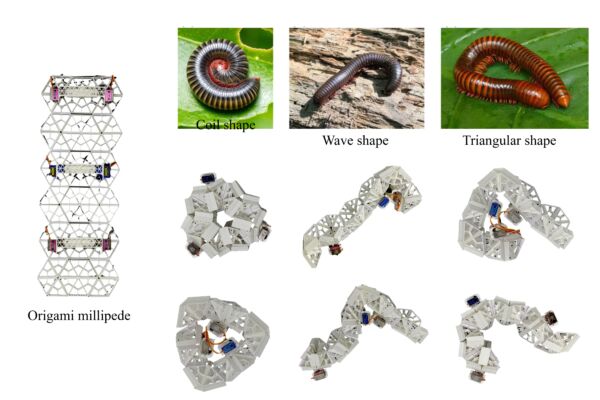
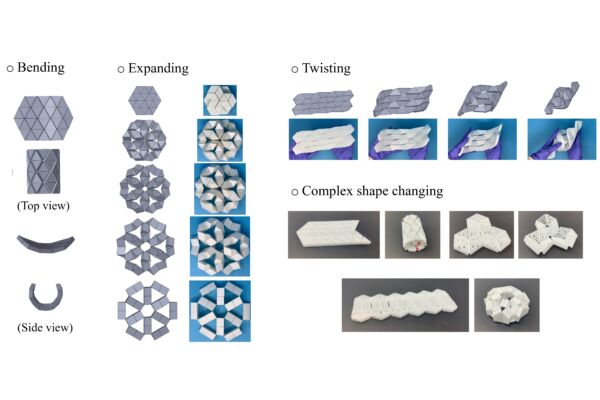
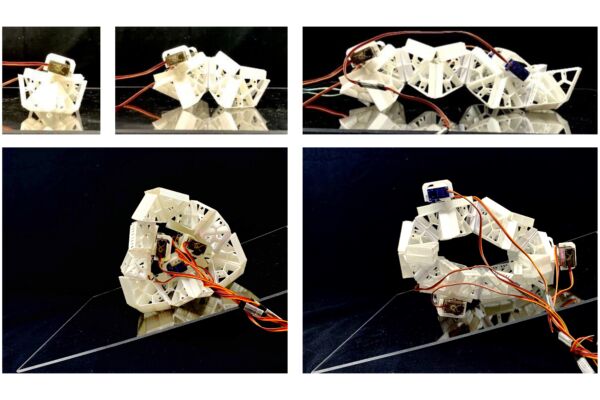
This project addresses the limitations of soft robots, which are difficult to control due to their excessive mobility. By incorporating thick-panel origami design, it enables the creation of more robust, adaptable robots with improved predictability and control. Using mechanical hinges and materials like wood, plastic, or metal, these robots can perform intricate tasks, such as grasping and reconfiguration, with minimal input. Applications range from agriculture and nuclear energy to disaster rescue, offering agility, strength, and adaptability in challenging environments
Chenying recently completed her DPhil in Engineering Science at the University of Oxford, supervised by Professors Zhong You (Special Structures Group) and Perla Maiolino (Soft Robotics Lab). Her research focused on modern structures inspired by origami (a.k.a. paper folding) and using their unique mechanical properties to design easy-to-fabricate robots with "intelligence". The prototypes include grippers, manipulators, and crawlers for potential agriculture, nuclear engineering, and disaster rescue applications. Passionate about societal impact, Chenying has also explored the role of structures in healthcare and sustainability. Alongside her research, Chenying teaches structures and mechanics at Christ Church College, Oxford.more
Jingyi Yang researches on origami and kirigami-inspred deployable structures that undergo large structural transformation. more

Liang He, PhD (Imperial College), is an Associate Professor at the University of Oxford. He leads the Healthcare Biorobotics Lab, focusing on soft robotics, wearable robotics, biosensors, VR, and embodied-AI solutions for healthcare applications.more
Portfolio